
热线电话
191-2198-6111

由于电抗式步进电动机的工作原理,电抗式步进电动机的原理相对简单。下面描述三相无功步进电动机的原理。
1、结构:电动机的转子中均匀分布着许多小齿,定子齿上有三个励磁绕组电阻,其几何轴与转子齿的轴交错。 0、1/3 2、2/3((两个相邻转子的齿轴之间的距离是齿距,用denoted表示)。换句话说,A与齿1对齐,而B与齿1对齐。右侧C和齿3向右偏移2/3,A"与齿5对齐。 (A"是A,齿5是齿1)以下是定子的放大图。转子:
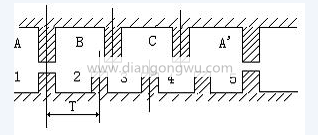
2、旋转:如果A相通电,而B相和C相未通电,则齿1在磁场的作用下与A对齐(即使未向转子施加力,该齿也适用)。当B相通电时,如果A相和C相未通电,则齿2应与B对齐。此时,转子向右移动1/3,No.3和C的偏移为1/3,齿4和A的偏移(て-1/3て)=2/3て。如果C相通电而A相和B相均未通电,则齿3应与C对齐。此时,转子向右移动1/3,第4号和A的偏移为1/3。种类。如果给相A通电而未给相B和C通电,则齿4与A对齐,并且分别向A,B,C和A分别给齿4供电后,转子向右移动1/3。前进到A相时,电机转子向右旋转一个螺距,如果一直按住A,B,C,A .则电机向右旋转每步(每个脉冲)1/3て。按A,C,B,A .接通电源,电动机将反转。可以看出,电动机的位置和速度与导通数(脉冲数)和频率一对一对应。方向由导电顺序决定。但是,它考虑了扭矩,稳定性,噪音和角度减小。通常使用A-AB-B-BC-C-CA-A的电导率状态,因此每个步骤的原始1/3更改为1/6。即使通过两相电流的不同组合,1/3也会变成1/12、1/24,这成为电动机分压驱动的基本理论基础。不难推理。电机定子的励磁绕组为m相,其轴线与转子齿轴线的偏移量为1/m,2/m .(m-1)/m,1。并且根据一定的相序导电,可以对电动机进行正向和反向控制。 ——这是步进电机旋转的物理条件。 只要满足该条件,理论上我们就可以制造任何阶段的步进电机,并且由于成本和其他考虑,市场上通常有2、3、4、5或更多阶段。
3、力矩:当电动机通电时,在定子和转子之间会产生磁场(磁通量Ф)。当转子和定子错开一定角度时,力F为(dФ/dθ)
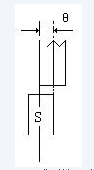
磁通量Ф=Br * S Br是磁密度,S是磁性区域,F与L * D * Br成正比,L是铁芯的有效长度,D是转子直径。 Br=N·I/RN·I是安培匝数(电流乘以匝数)R是磁阻。扭矩=力*半径扭矩与电动机的有效体积成比例。 *安培旋转*磁密度(仅考虑线性状态)因此,电动机的有效体积越大,励磁安培旋转的次数就越大。定子和转子之间的气隙越小,电动机转矩越大,反之亦然。
公司地址 : 上海市嘉定区宝安公路2999弄
公司邮箱 : 19121986111@163.com
公司电话 : 021-6992-5088
