
热线电话
191-2198-6111

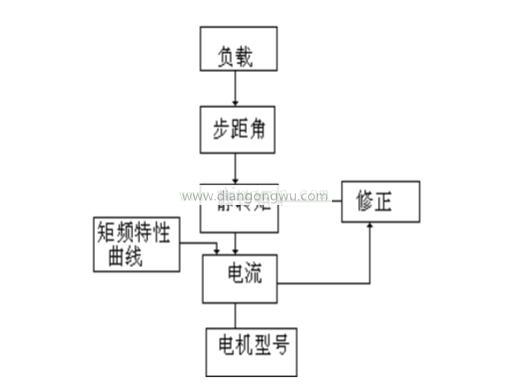
1.选择步距角
电机的步距角取决于负载精度的要求。它将负载的小分辨率(等效值)转换为电动机轴以及每个等效电动机必须行进的角度(包括减速度)。电机的步距角必须小于或等于该角度。当前市场上的步进电动机的步进角通常为0.36度/0.72度(5相电动机),0.9度/1.8度(两相和四相电动机)和1.5度/3度(三相)电机)。 ), 等等。
2.静态力矩的选择
步进电机的动态转矩很难一次确定,因此我们经常首先确定电机的静态转矩。静态转矩的选择基于电动机的负载,该负载可分为两种类型:惯性负载和摩擦负载。没有单一的惯性载荷,也没有单一的摩擦载荷。直接启动(通常以低速启动)时,必须同时考虑两种类型的负载,在加速启动时主要考虑惯性负载,而在以恒定速度运行时仅考虑摩擦负载。通常,静转矩应在摩擦负载的2-3倍之内,如果选择静转矩,则可以确定电动机的机架和长度(几何尺寸)
3.当前选择
具有相同静态转矩的电动机由于电流参数不同而具有非常不同的工作特性。可以根据转矩-频率特性曲线判断电动机的电流(请参见驱动电源和驱动电压)。
总之,选择电动机时应遵循以下步骤。
4.扭矩和功率转换
传入电机通常用于更大范围的调速,并且具有可变功率。通常仅使用扭矩来测量扭矩。扭矩和功率的转换如下。
P是功率单位(瓦特),Ω是每秒的角速度(弧度),n是每分钟的速度,M是扭矩单位(牛顿计)P=2πfM/400(半步运行)每秒f脉冲(称为PPS)。
公司地址 : 上海市嘉定区宝安公路2999弄
公司邮箱 : 19121986111@163.com
公司电话 : 021-6992-5088
