热线电话
191-2198-6111

使用步进电机的步骤和步进电机速度的计算方法是将数字输入脉冲转换为旋转或线性增量运动的电磁执行元件。输入步骤角度以增加输入角度进入脉冲电机旋转步骤。电动机的总旋转角度与输入脉冲的数量成比例,相应的速度取决于输入脉冲频率。

使用步进电机以及如何计算步进电机速度通常是机械集成产品的主要组件之一,通常用作定位控制和固定速度控制。步进电机较低,位置高精度,无累积误差,无需简单。 CNC机床,包装机,计算机外围设备,复印机和传真机广泛用于电子机械整合产品。

使用步进电机并选择步进电机时,选择步进电机,选择步进电机时,步进电机的输出功率大于负载所需的电源。选择电源步部电机时,首先计算机器系统的负载扭矩,电机的整流符合机械负载并验证特定边距。 *。在实际操作期间,各种频率的负载扭矩必须在矩形频率特性曲线的范围内。通常,MJMAX的静态力矩大,负载力矩大。

步进电机的选择和步进电机速度的计算方法应在选择步进电机时匹配步进角度和机械系统,从而可以获得机床所需的脉冲等同物。在机械透射中,一个以使较小的脉冲等效物是改变负载的引导,另一个可以通过步进电机的细分来完成。但是,该段可以在不改变精度的情况下改变分辨率。精度由电机的独特特性决定。

选择步进电机的方法和步进电机速度的计算可以确定选择电源台电机,从而应估计机械负载的负载频率以启动机械要求的频率,因此惯性频率特性步进电机。边缘创造了高速度的连续工作频率,以满足机床速度运动的需要。

要选择步进电机,需要以下计算:

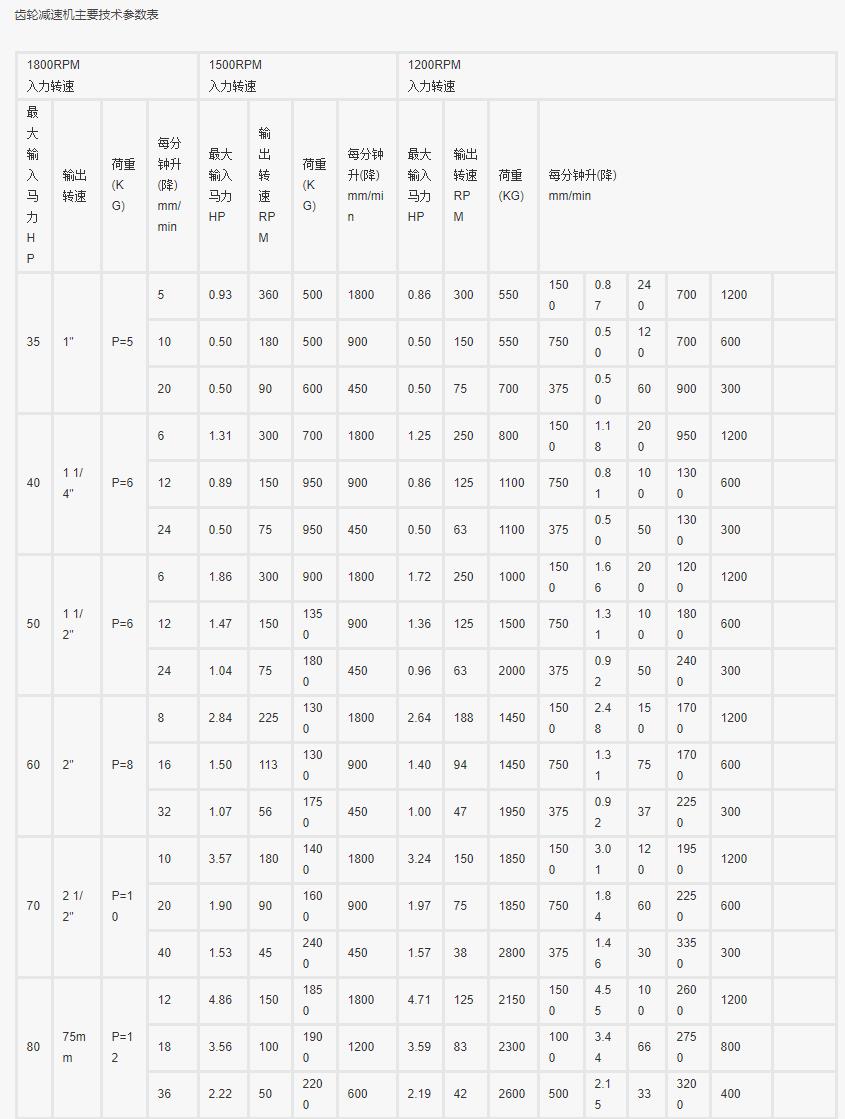
(1)计算齿轮的减速比。

根据所需的脉冲量,减速比计算如下:

i=(φs)/(360.Δ(1-1)φ-步骤电机每个(O /脉冲)

s ---螺旋桨螺距(mm)

δ-(mm/pulse)

(2)计算工作台,螺钉和齿轮以转换电机轴的惯性JT。

JT=J1 +(1/I2)[(J2 + JS)+ G(S /2π)2) (1-2)

JT的惯性---电机轴(kg.cm.s2)(kg.cm.s2)

J1,J2 - 齿轮惯性(kg.cm.s2)

JS。 ----螺丝惯性(kg.cm.s2) W ---工作台重量(n)

S ---螺旋桨螺距(cm)

(3)电机输出总扭矩M的计算

m=ma + mf + mt。 (1-3)

MA=(JM + JT).n/T×1.02×10×2(1-4)
马 - 摩托车,加速扭矩(n.m)

JM,JT ---电机自己的惯性和负载惯量(kg.cm.s2)

n ---电机所需的速度(r/min)
T ---电机升压时间

MF=(U.W.S)/(2πη)×10×2(1-5)

MF ---带有电动机的肋(n.m)导游

U - 分类系数

η-传输效率
mt=(pt.s)/(2πη)×10×2(1-6)

MT切割力被转换为电动机扭矩(n.m)。

Pt ---切割力(n)

(4)开始加载频率估计。 CNC系统用负载扭矩和惯性控制电动机的起始频率,估计公式
FQ=FQ0 [(1-(MF + MT))/mL]÷(1 + JT/JM)] 1/2(1-7)

FQ ---启动频率(Hz)

FQ0--开始频率

ML ---电动机输出扭矩通过启动频率(n.m)以整流整流确定

如果无法准确确定加载参数,则可以估计按下FQ=1/2FQ0。

(5)频率计算和增加的操作时间。因为电机的输出扭矩随着频率的增加而减小,所以频率高 必须驱动矩形频率特性的输出扭矩,并且必须具有足够的余量。
(6)扭矩路和静态时刻mmax。负载扭矩可以从公式(1-5)和(1-6)计算。当电动机处于供应速度时,由矩形频率特性确定的电动机输出扭矩大于MF和MT的总和。有余量。通常,MF和MT(0.2至0.4)的总和必须小于MMAX。

公司地址 : 上海市嘉定区宝安公路2999弄
公司邮箱 : 19121986111@163.com
公司电话 : 021-6992-5088